



Instagram is one of the biggest social platforms that are best for boosting your business, personal profiles, talents, and more. The sad part is Instagram does not allow you to add multiple links to your bio or story. There is an exceptional case when you have more than 10k followers on Instagram; you can add links to your story, but what if you don’t have such a following? Don’t worry, and I have a simple trick on adding multiple links in the Instagram bio and helping you showcase links to business, TikTok, or anything else. Let’s get started.
Why Use Linktree to add multiple links in the Instagram Bio?
Problem:
As we know, adding multiple links to the Instagram bio is not possible, as there is only one website field. Besides, you can not share links in Instagram stories unless you have a minimum following of 10k. So, you resort to the situation by changing the link in bio repeatedly. What can you do about adding multiple links to your Instagram bio without having to remove the earlier one?
Solution:
Linktree is an online tool that helps to create a link page with multiple links. All you need to do is create a Linktree page and add all the links such as Facebook, Whatsapp chat link, TikTok, Signal, Clubhouse, and everything else. This Linktree page can be used in the website field, and when your followers click it, they can find all the links in one space.
Another benefit that I find with Linktree is you can label the button, such as visit my website and then add a web link. This makes it easier for followers to know what they are clicking on.
How to Create a Linktree Page for Instagram Bio?
Now that we know what a Linktree page is, how about we get started on creating one for our page?
Below are the steps to create a Linktree page for Instagram bio –
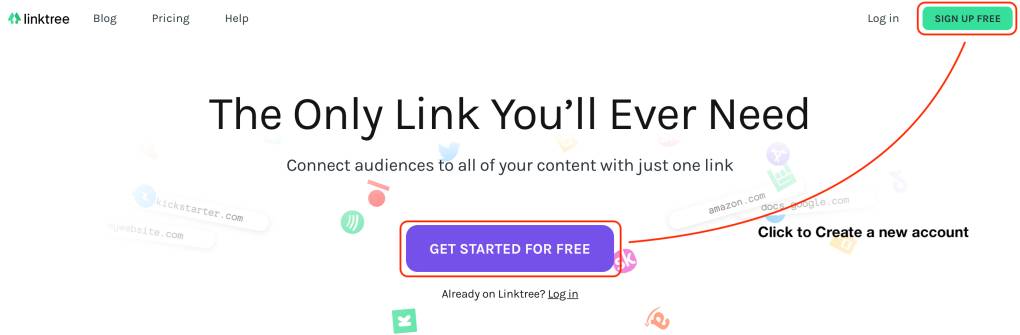
- Visit Linktree and click on “sign up for free” from the right top of the website.
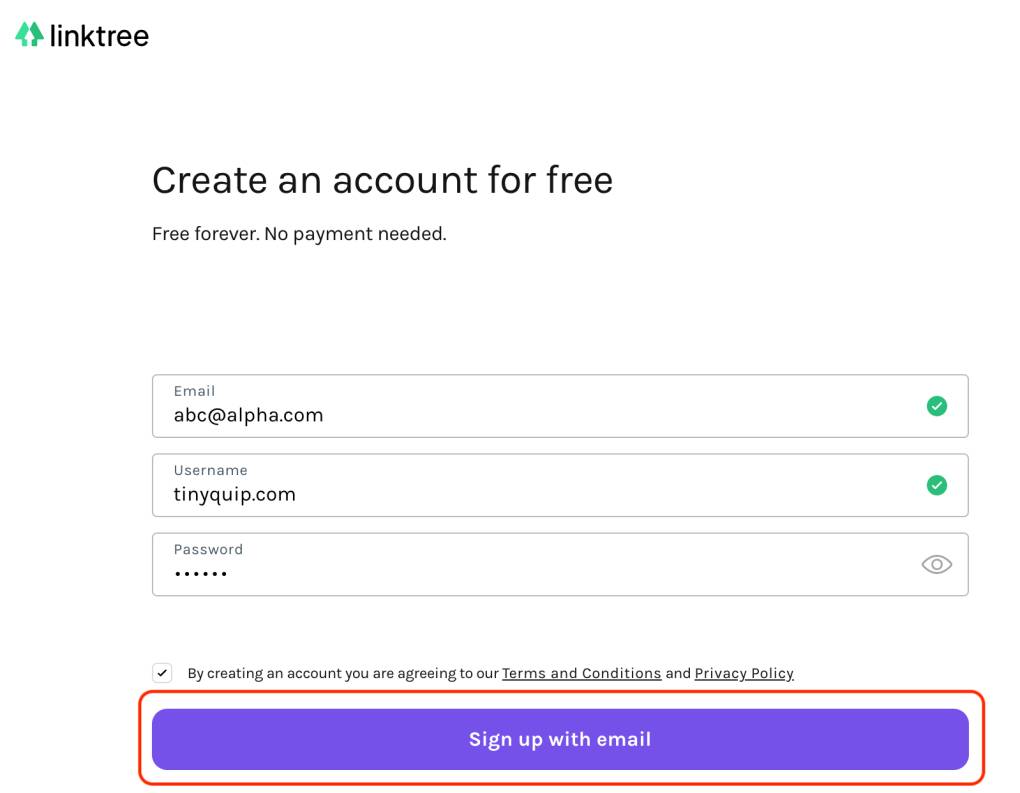
- You will be redirected to a new page, where you need to create an account. Don’t worry, it’s free, now and forever.

- Once you have created an account, you will now be directed by a guided setup. To start with, you are asked to add a name to your Linktree. We suggest you keep it similar to your Instagram username, and it is easier for followers to find it. In our case, we named it https://linktr.ee/tinyquip.
- Now, adding categories of links and a few additional information should do complete most of the setup. Click on save details and proceed to one final step.
- The final step is to select if you wish to go with the free plan or a paid plan. Most of the users go with the free plan; it does the job.
We did register ourselves and create a Linktree page. But hey, don’t you want to add links to it and see how it looks? I surely do. Let’s see how to add multiple links in Instagram bio using Linktree.
Also read: 9 Best WiFi Range Extender and Internet Signal Boosters
How to Add Multiple Links to Instagram Bio using Linktree?
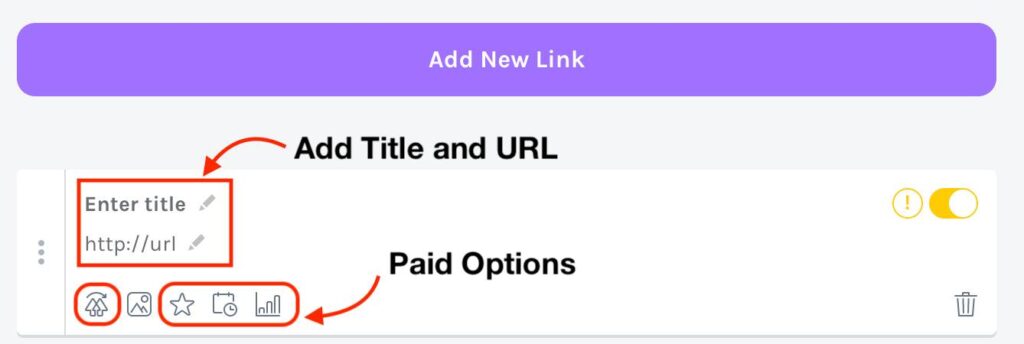
- Go to the Linktree dashboard and click on “Add New Link.”
- You can find a new field box right below the add new link option. Here, you need to enter the title and URL of the page you want to link.
- After adding the title and URL, you can also set a few other thumbnail icons, schedule the links, and analytics. But most of these features are with the paid version.
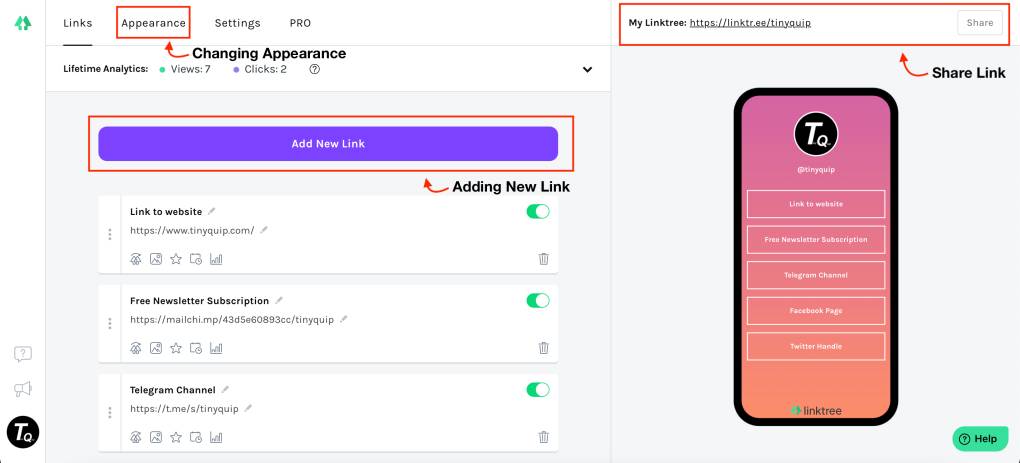
- Once you have added a new link, you can view the Linktree page in the right window. Where an emulator showcases to you what your Linktree page will look like.
- Click on the “Add new link” button again to add multiple links that you want to be shown on the Instagram bio.
How to Change the Appearance of Linktree Page?
You must be wanting to change the basic look of your Linktree page and make changes like add your picture. I bet you do because we did too. The process is easy but most features require you to subscribe to a paid plan. For free makeover of your Linktree page, here is what you can do –
- Go to the Linktree dashboard and click on the “Appearance” option.
- Now, you can find an option to upload your profile picture. Click on it to pick an image and resize it to fit the frame.
- You can also add a bio and Title for your Linktree that your followers will be able to read.
- Then you can change the theme, but the free options are limited. With the paid ones, you can change the button type, custom backgrounds, and more.
- Once done, share the link anywhere on the web. It is not restricted to Instagram, and you can also use it on your Whatsapp business account to showcase your multiple profiles and businesses on the internet.
How to Add Linktree to Instagram Bio?
- Now that your Linktree page is ready. Click on the share option from the right top of the admin dashboard and copy the link.
- Open Instagram on your laptop or mobile; make sure you have the link copied to your clipboard.
- Navigate to your Instagram profile and click on “Edit Profile.”
- In the website field, click on “Website address” and paste the link.
- Save the changes, and voila, you are done.
Also read: 7 Best Offline Messaging Apps To Send Messages Without Internet
Frequently Asked Questions –
No, Linktree is not banned on Instagram, and you can add multiple links to your Instagram profile using Linktree.
Linktree is an online tool that allows you to add multiple links to your Instagram profile or bio within a single link.
There is no restriction on how many followers you have to use Linktree. You can use Linktree even when you have 0 followers.
There is no sensitive information that Linktree collects, so it is completely safe to use Linktree.
Final Words
It was easy to add multiple links to your Instagram bio. Now, ask your followers to hit the link in bio and visit your link. A lot can be done with the paid plan, but the free version does most of the job. Will you use Linktree to add multiple links to your Instagram bio? Let me know in the comment section.
You may also like,





